Oswin So
4th year PhD @ REALM, MIT AeroAstro

I am interested in developing structure-exploiting algorithms for the learning and control of dynamical systems. My research has mainly focused on improving safety in reinforcement learning using Hamilton-Jacobi reachability analysis and Control Barrier Functions, with applications to multi-agent systems and fixed wing aircraft. I have also dabbled in topics such as reasoning in (d)LLMs.
I’m currently at REALM at MIT, advised by Chuchu Fan. Previously, I did my undergrad at Georgia Tech, where I was very fortunate to do undergraduate research with Evangelos Theodorou and Molei Tao.
The past summer, I interned at META FAIR working on fine-tuning discrete generative models characterized by Continuous-Time Markov Chains (e.g., diffusion-based LLMs), where I was mentored by Guan-Horng Liu and worked with Ricky T. Q. Chen. I’ve previously interned at Toyota Research Institute, where I worked on game theoretic planning. I also worked at Aurora as a Behavior Planning Intern during the summer of 2021 under Paul Vernaza and Arun Venkatraman, working on cost function learning via on-policy negative examples for autonomous driving.
See my full CV here (updated in February 2026).
Contact: oswinso [at] mit [dot] edu
Follow: Google Scholar | LinkedIn | oswinso | @oswinso
news
| Feb 16, 2026 | I am looking for internship positions for summer 2026! If you have an opening for a research intern, feel free to reach out to me via email! |
|---|---|
| Jan 19, 2026 | Three new papers were accepted to ICLR2026!
|
selected publications
- ICML 2026Learning-to-Optimize via Deep Unfolded FlowsIn International Conference on Machine Learning (ICML), 2026[Spotlight, top 2%]
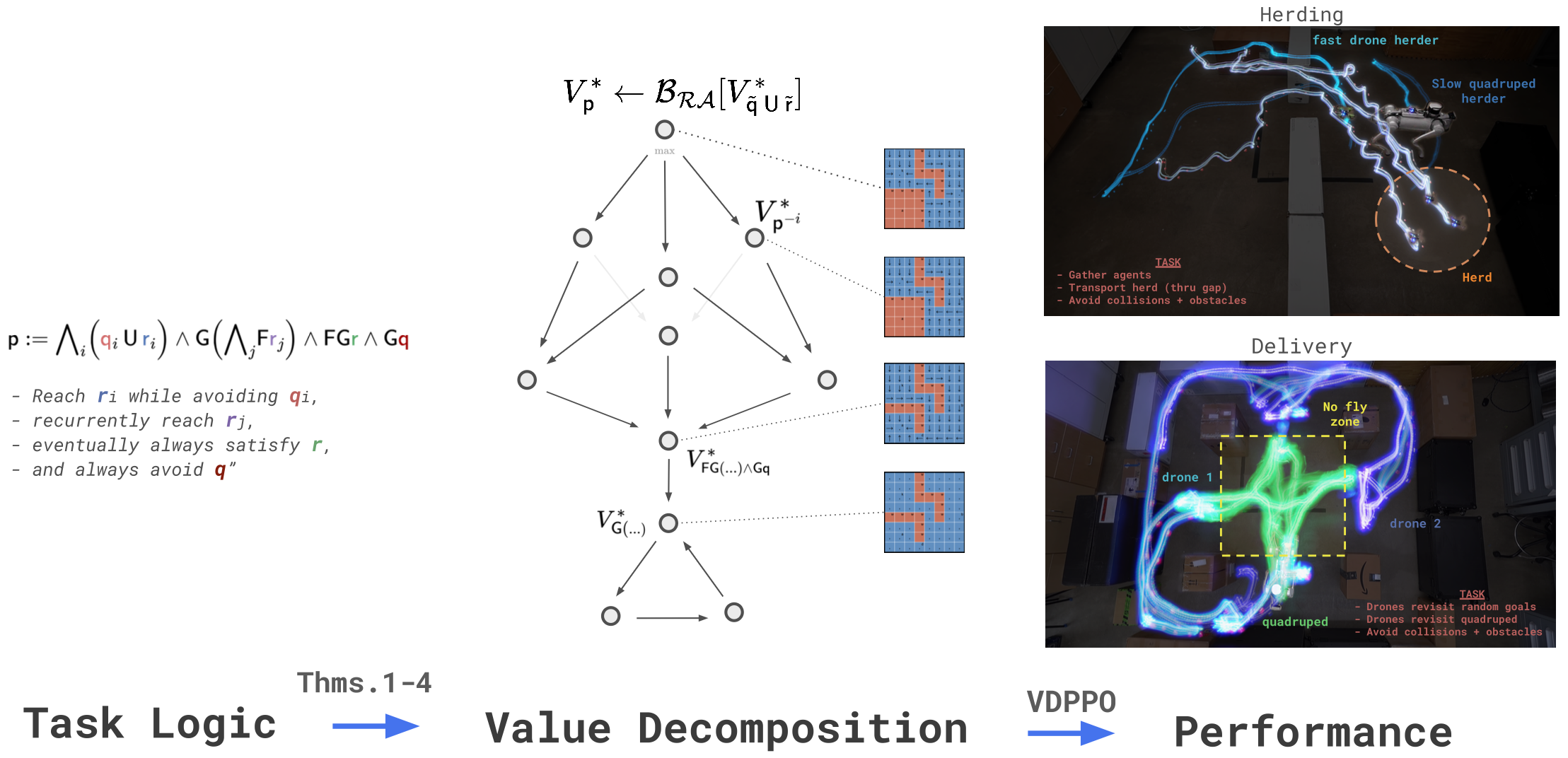
- RSS 2026
- Nat. Commun.
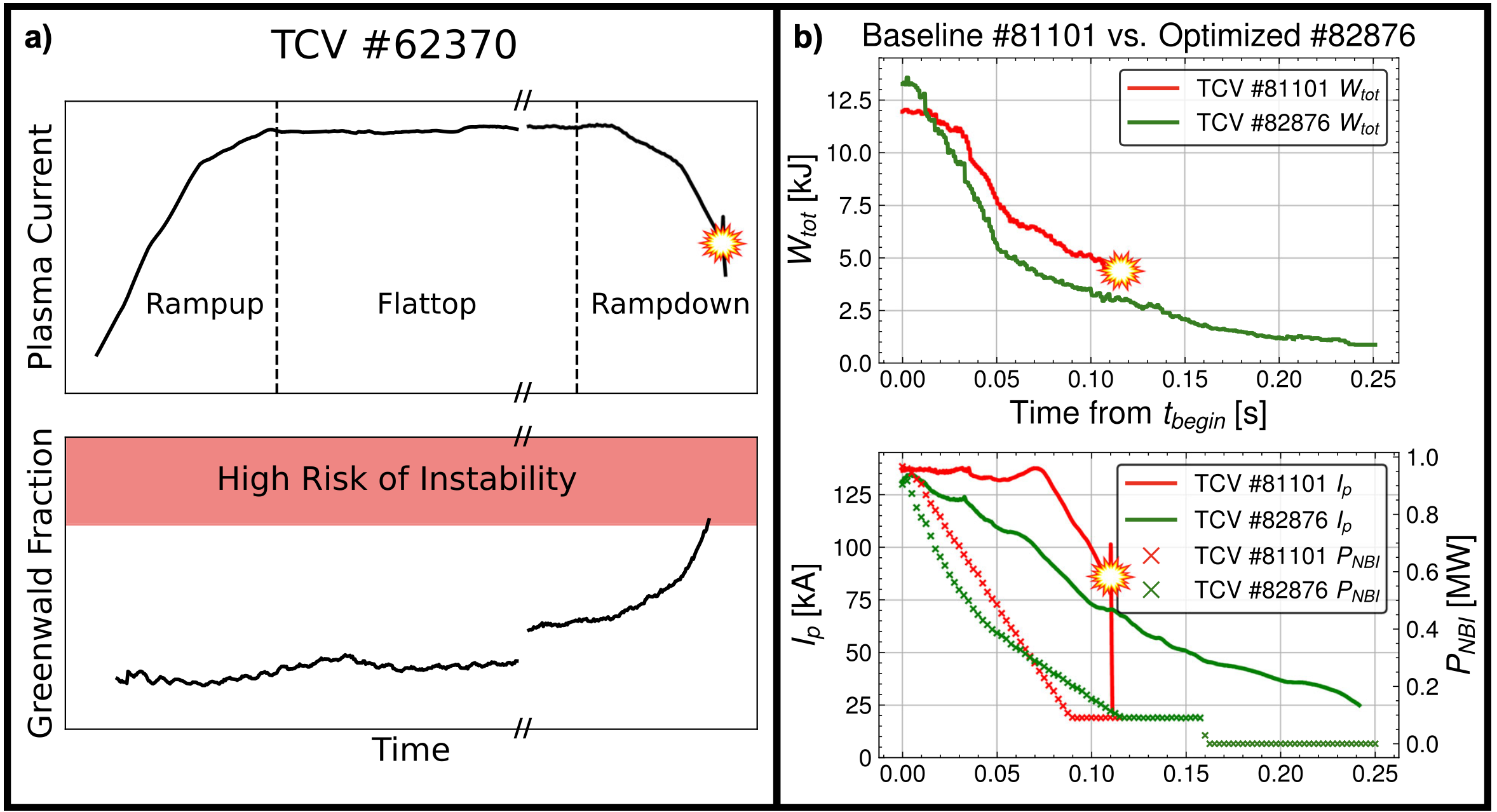 Learning plasma dynamics and robust rampdown trajectories with predict-first experiments at TCVNature Communications, 2025
Learning plasma dynamics and robust rampdown trajectories with predict-first experiments at TCVNature Communications, 2025 - T-RO
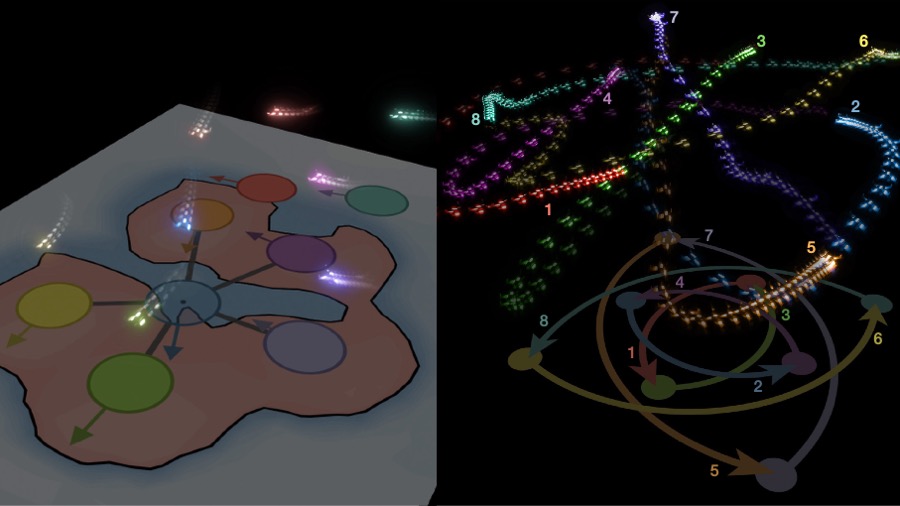 GCBF+: A neural graph control barrier function framework for distributed safe multi-agent controlIEEE Transactions on Robotics (T-RO), 2024
GCBF+: A neural graph control barrier function framework for distributed safe multi-agent controlIEEE Transactions on Robotics (T-RO), 2024 - RSS 2023
 Solving Stabilize-Avoid Optimal Control via Epigraph Form and Deep Reinforcement LearningIn Robotics: Science and Systems (RSS), 2023
Solving Stabilize-Avoid Optimal Control via Epigraph Form and Deep Reinforcement LearningIn Robotics: Science and Systems (RSS), 2023













